Flat Representation of Surfaces.
| Now that you have some knowledge about mappings and surfaces lets try to find the configuration space of the above machine. We already know that a circle could represent the movement of the 1-leg machine. Another valid representation would be a line scaled from 0 to 360, Each point on the line represents in degrees the angle between the leg and the straight up line (moving in the clockwise direction). Similar to the flat maps of earth we consider the 2 endpoints of the line as the same point in order to make this representation a valid one. |
|
|
| No matter the position of the first leg, the second also rotates in 360o. Therefore, we can represent the machine's configuration space by a square with vertical and horizontal coordinates going from 0 to 360. The horizontal coordinate corresponds to the angle of the first leg and the vertical one corresponds to the angle of the second leg: |
|
|
You can move the machine or the state of the configuration space by clicking the appropriate frame and using the arrow keys. |
The square, which represents the configuration space of the 2-legs machine, is not a regular square; a point moving in the right direction would eventually appear on the left side of the square. Similarly, a point moving upwards would eventually appear on the bottom. Is this "square" a surface? In order to answer this question one has to check that each point on this "square" has 2-dimensional local property. Obviously, this is true for all points inside the "square". You can check with the help of the demo applet that for all points on the edges of this "square" it is possible to move in all direction of the plane. Therefore, the configuration space of the 2-leg machine is a surface. Are we familiar with the its class type?
| For every 0<y<360 the coordinates (0, y) and (360,y) represent the same point, therefore if we fold the square so that finally this 2 edges are one, the result is a ring as shown in the demonstration applet: |
|
| Our next step is to identify the inner and external sides of the ring to finally end with a Torus, click on the torus image to download a demo animation. We conclude that the configuration space of the 2-leg machine is a Torus. |  |
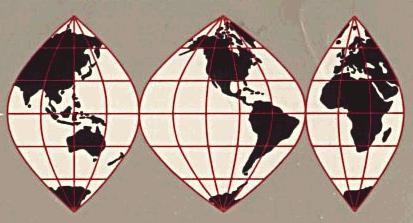
We have already encountered flat representations of Planet Earth usually by a rectangular structure. As an additional example for flat representations of surfaces, below is another representation of planet earth. In this representation, it is obvious how the edges are connected.
|
Sinusoidal Equal Area Map |
| Not all configuration spaces are surfaces. Since the next lesson discusses only configuration spaces that are surfaces, we will not discuss geometric objects with local property of higher dimension since this is much more complicated to visualize, if possible. For example the configuration space of the 3-leg machine has the local property of 3-dimension i.e. an ant stepping through this object believes it is in a regular 3-dimension space. You can imagine this space as a cube with the opposite sides identified. |
|
This lesson taught you some basic notions in Topology which are interested by themselves, in the next lesson we will use this notions to study more complicated machines.
![]()